开关
UTP系统CAN测试简介
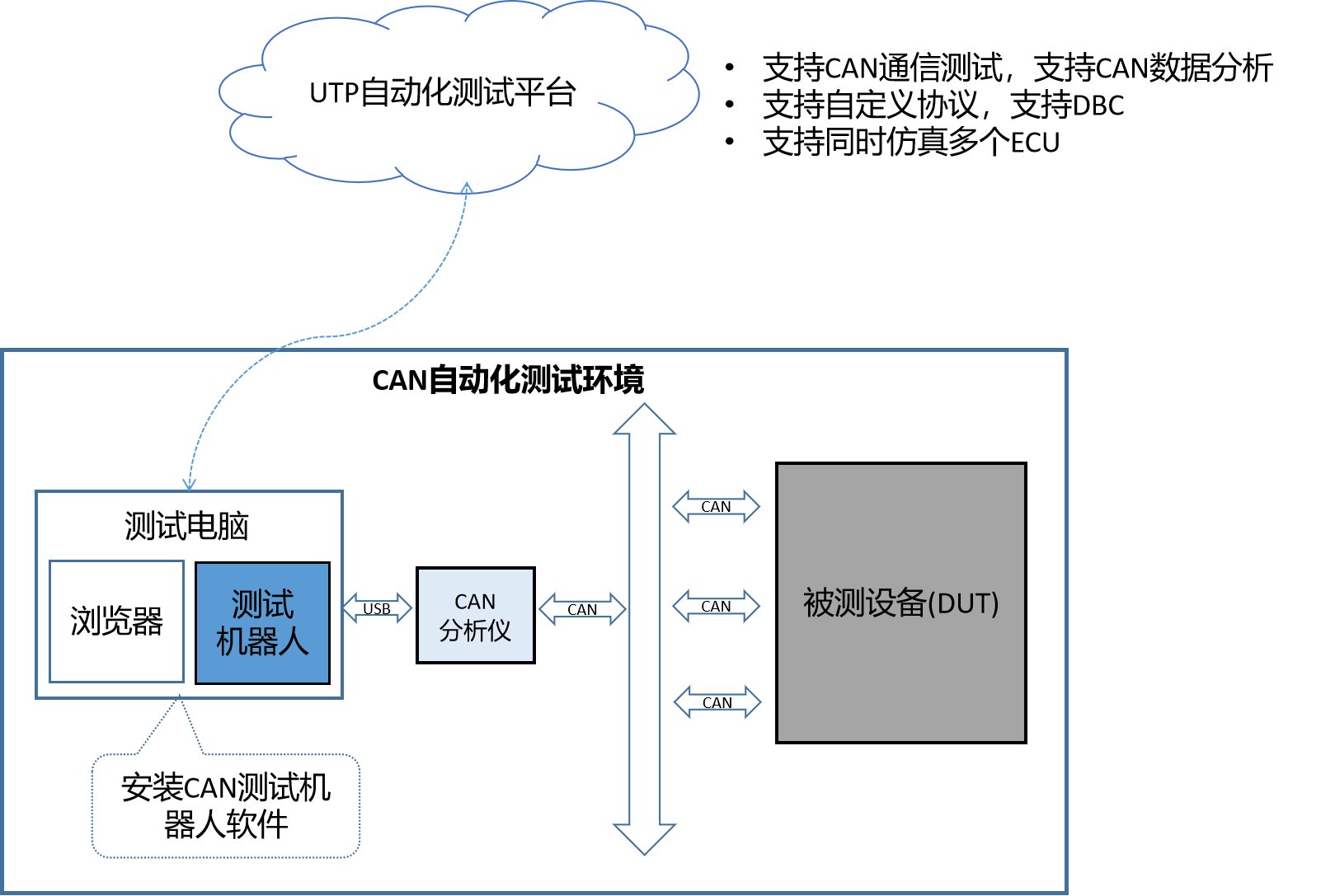
UTP测试系统支持CAN和CANFD测试自动化测试,支持CAN报文收发测试、CAN信号测试、节点仿真测试等各种功能。UTP公有云下载的CAN测试机器人软件兼容市面上各厂家的CAN分析仪(如周立功、广成科技、创芯科技等),用户只需要下载即可配合已有的CAN分析仪使用。UTP系统提供本地化部署版本,本地化部署版本提供更多的硬件选择,如需要请联系我们。
测试功能介绍
UTP测试系统支持CAN自动化测试,支持以下各种功能的测试
功能 |
功能描述 |
功能操作 |
|---|---|---|
| 报文收发 | 测试被测设备的CAN报文通信,支持对被测系统的各种业务功能进行测试 | 点击查看 |
| 周期报文 | 支持向被测设备周期发送报文,支持检查被测设备的周期报文是否满足预期要求 | 查看:发送周期报文 |
| 总线数据分析 | 对CAN网络各个节点发出的CAN数据进行分析 | 点击查看 |
| 信号分析 | 对指定CAN消息中的信号(协议字段)进行分析 | 点击查看 |
| CAN通信调试 | 支持向被测设备发送CAN报文, 调试被测设备的工作行为 | 点击查看 |
| 报文自动检查 | 对被测设备发出的 CAN 报文进行检查,检查报文 ID,检查报文原始帧 | 点击查看 |
| 信号自动检查 | 对被测设备发出的报文中的信号进行检查,检查信号值,信号范围 | 点击查看 |
| 周期报间隔检查 | 验证被测设备在规定的时间内发出某条消息。 | 点击查看 |
| 异常场景测试 | 针对异常场景进行模拟,比如错误信号、错误报文、错误顺序等场景模拟 | 点击查看 |
| 测试数据覆盖 | 根据预设的信号范围,自动生成有代表性的 CAN 报文进行测试 | 点击查看 |
使用前准备
UTP测试系统通过安装在电脑上的CAN接口模块接入被测系统的CAN网络,如下图所示:
注:
1) UTP公有云版本提供的CAN测试机器人, 支持周立功及所有兼容周立功的其他厂商CAN分析仪(如广成科技、创芯科技等), 用户可以自行购买相应硬件。
2) 用户从UTP公有云下载(下载链接)CAN测试机器人软件并安装在本地的电脑上,如使用兼容周立功的其他厂商CAN分析仪,需要参考该分析仪使用说明,将分析仪对应的ControlCAN.dll,如下图

3) UTP系统支持各主流厂商(如Peak, Kvaser,NI,周立功等)的各种CAN分析仪或接口卡,如需要,请联系我们获取相应测试工具。
使用操作简介
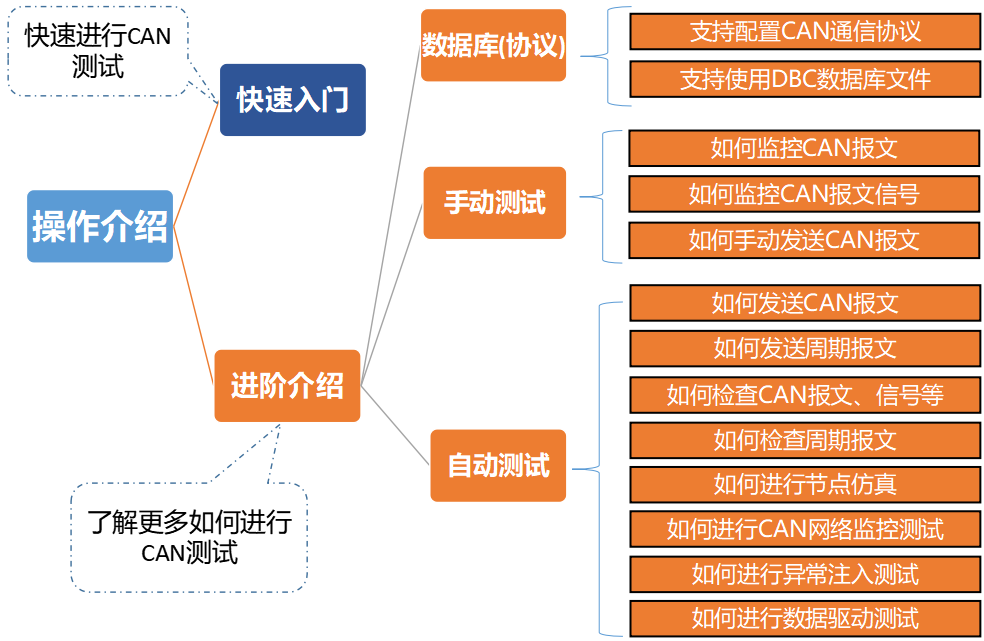
如何利用UTP测试系统进行CAN测试,下面是介绍文档的结构说明,在左侧导航栏也列明了相关功能点,可直接点击进行参照
快速操作入门
UTP测试系统支持CAN测试,可以通过下面的文档快速体验如何进行CAN测试,快速入门文档包含以下几点:
1. 下载测试软件并安装
2. 创建测试项目
3. 导入示例协议配置测试机器人
4. 发送数据报文
快速体验请参看文档CAN通信测试快速入门
进阶1--创建协议(数据库)
1)在线编辑通信协议
CAN通信需要借助宏控UTP测试平台支持用户在线编辑创建协议,支持创建出各种规格的协议
请参考下面视频链接来使用协议的在线创建功能
2)DBC文件转换
宏控UTP测试平台支持用户自定义协议,也支持用户将已有的DBC格式的协议转换成UTP平台可识别的协议。
转换方式如下:
1.转换操作视频:查看链接如何进行DBC文件转换
2.转换操作文档:
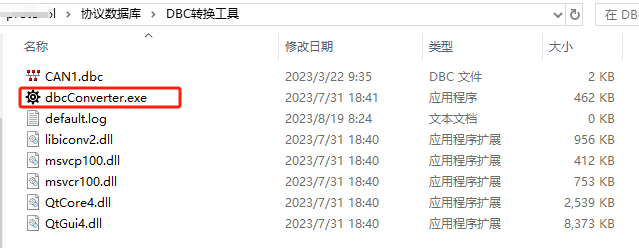
首先,点击此链接下载DBC转换工具:DBC转换工具
下载完成,解压文件,进入文件夹“DBC转换工具”,双击“dbcConverter.exe”打开DBC转换工具:
在转换工具页面选择需要转换的DBC文件,然后点击转换按钮:
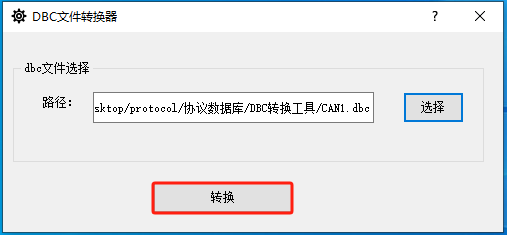
转换成功,界面会弹出转换成功提示:
转换完成,返回文件夹,每个节点都生成了一个文件,可用于不同节点的通信。还生成了所有message的集合文件,可以用于测试数据:

下面,将转换好的协议导入到UTP平台中,即可进行CAN通信测试用例编辑。
返回UTP云平台,点击“协议管理”:

在弹出的“协议管理”页面中点击“导入协议”按钮,打开“协议配置信息”页面,选择刚刚转换好的协议,点击“确定”按钮:

协议导入成功:
协议导入成功后,可在后续的测试中使用
进阶2--手动测试CAN通信
本章将介绍如何手动测试CAN通信,包括UTP系统手动测试介绍以及如何进行CAN监控
手动测试介绍
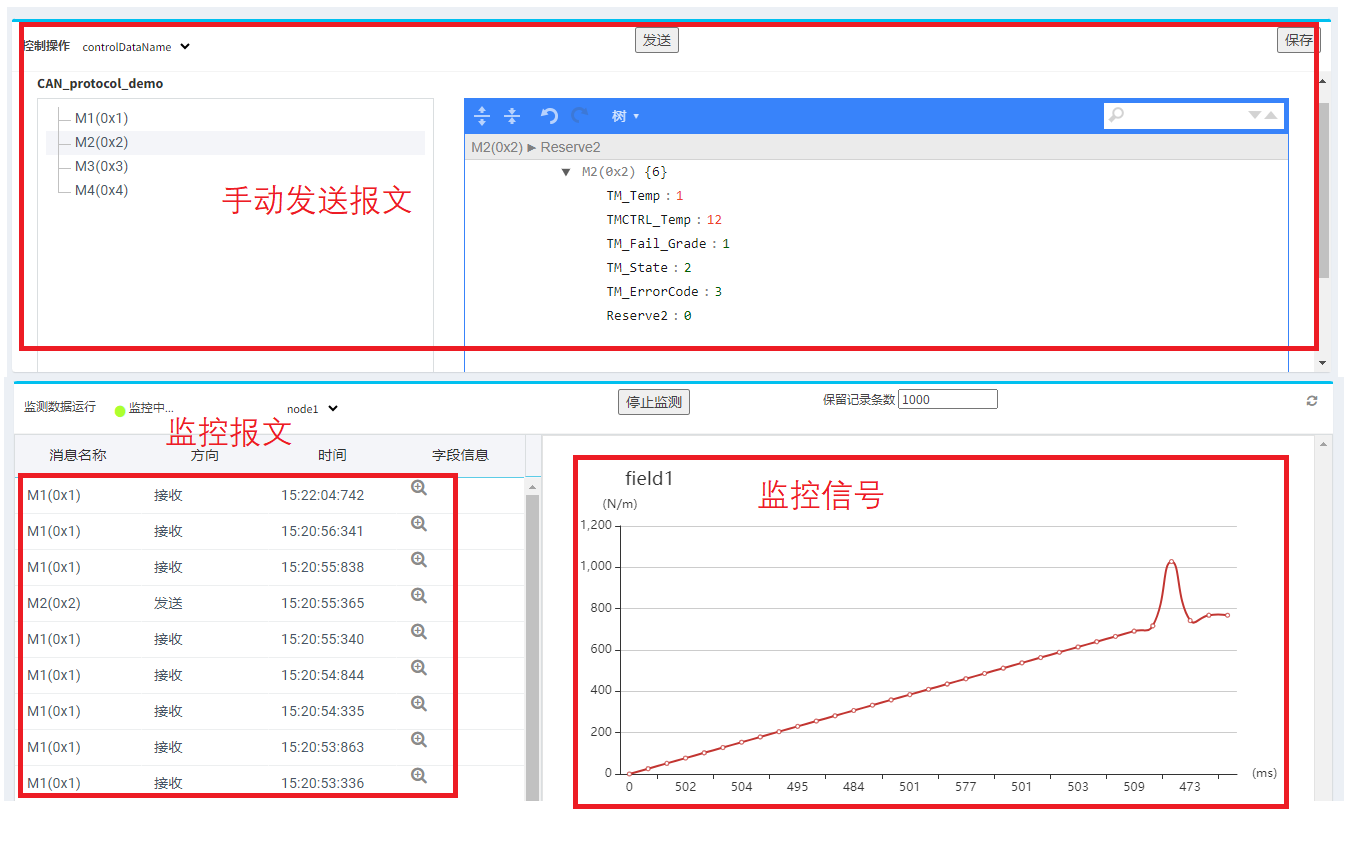
UTP系统支持对CAN通信数据进行监测,支持手动发送CAN报文。下图是对UTP系统总线监控界面的介绍。
1、手动发送报文:用户可以在UTP系统中手动向被测设备发送报文,可以选择要发送的CANID,并对信号进行编辑。
2、监控报文:可以监测通信过程中,所有收发的报文。
3、监控信号:对通信过程中的指定信号进行监测,观察信号的变化。
1)监控CAN报文
本节将介绍如何监测CAN通信过程中收发的报文,并支持对报文进行解析。具体操作方法如下:
点击此链接可以查看如何监控CAN报文::监控报文操作
2)监控CAN信号
本节将介绍如何对通信过程中串口报文中某个或某几个信号进行监测,观察这些信号的变化趋势。具体操作方法如下:
点击此链接可以查看如何监控CAN报文信号::监控CAN信号操作
3)手动发送CAN报文
本节将介绍如何向被测设备手动发送CAN报文。具体操作方法如下:
点击此链接可以查看如何向被测设备手动发送CAN报文::手动发送CAN报文
进阶3--自动测试CAN通信
1)发送CAN报文
UTP系统支持向被测设备发送CAN报文,给设备激励来对被测设备进行测试。根据测试目的和测试环境的不同,向被测设备发送消息也分成多种方式,下面是几种常用方式:
①直接向设备发送消息:直接插入发送命令向设备发送消息,便于试用和调试时使用
②向设备周期发送串口消息:如设备需要周期消息的输入,可以使用此方式
③发送文件中的消息:某些场景下,用户已经有了一些数据文件,可以直接发送文件中的消息
④便于复用的消息发送:这种方式写出的测试用例便于脚本复用,尤其适用于数据驱动测试
点击此链接可以查看发送CAN报文的各种方式及操作方法::发送CAN报文
2)周期发送CAN报文
UTP系统支持向被测CAN设备周期发送CAN报文,下面是操作方法
点击此链接可以查看周期发送CAN报文的操作方法::周期发送CAN报文
3)检查CAN报文
UTP系统支持对被测设备发出的CAN报文进行检查,提供了多种检查方式,当前介绍以下几种检查方式:
①检查报文:介绍如何对接收到的报文帧进行检查
②检查消息字段:介绍如何对接收到的CAN报文信号进行检查
③检查字段范围:介绍如何对接收到的报文中某些信号是否在规定范围内检查
④检查时间:介绍如何检查在规定时间内是否有报文发送
⑤检查周期间隔:介绍如何检查周期消息的时间间隔
点击此链接可以查看检查CAN报文的操作方法::检查CAN报文
4)检查周期报文
UTP系统支持对设备发出的周期报文进行检查,检查周期间隔,下面是操作方法
点击此链接可以查看检查CAN周期报文的时间间隔操作方法::检查CAN周期报文
5)节点仿真测试
UTP系统支持节点仿真测试,可以仿真CAN网络中的一个或多个节点,如可以同时仿真一个或多个ECU同被测控制器进行CAN通信,可以仿真各种正常和异常的测试场景。
将原本CAN网络中的通信节点用 UTP系统CAN测试机器人进行模拟,使整个CAN网络在仿真节点(CAN测试机器人)的帮助下正常运行,从而对CAN网络中的其他正常节点进行全面测试

6)监控CAN网络
同时,UTP系统支持监控CAN网络中各个节点的通信,检查通信是否正常
在原本的CAN网络中接入CAN测试机器人,接收CAN网络中所有节点的通信数据进行检查

7)配置自动回复
本节介绍如何实现当收到被测设备发来的CAN报文后自动给出回复报文,下面是操作步骤:
点击此链接可以查看UTP系统配置自动回复的方法::配置自动回复
8)异常数据注入测试
UTP系统支持模拟异常场景,进行异常注入测试
点击此链接可以查看UTP系统进行异常注入测试的方法::异常注入测试
9)数据驱动测试
UTP系统支持数据驱动测试,支持加载用户已有数据进行数据驱动测试,也支持利用UTP脚本自动生成测试数据进行数据驱动测试
点击此链接可以查看UTP系统进行数据驱动测试的方式及操作方法::数据驱动测试
CAN测试命令介绍
上面几个章节介绍了CAN测试的快速入门以及常用的一些测试场景,在这些介绍中涉及到了部分CAN测试命令,但未能包含所有命令的介绍。下面链接包含CAN测试涉及的所有命令
点击链接查看命令文档CAN通信测试命令文档