
嵌入式测试套装安装完成后,可进行登录,登录后可根据实际需要配置需要使用的测试机器人。
双击测试机器人盒子图标:
进入登录页面,输入账号与密码进行登录。此处账号可以是用户在宏控UTP公有云上注册的账号,也可以是系统为游客自动分配的账号(例如账号:Guest20221217105552A2@utpcloud.macrosoftsys.com, 密码:123456):

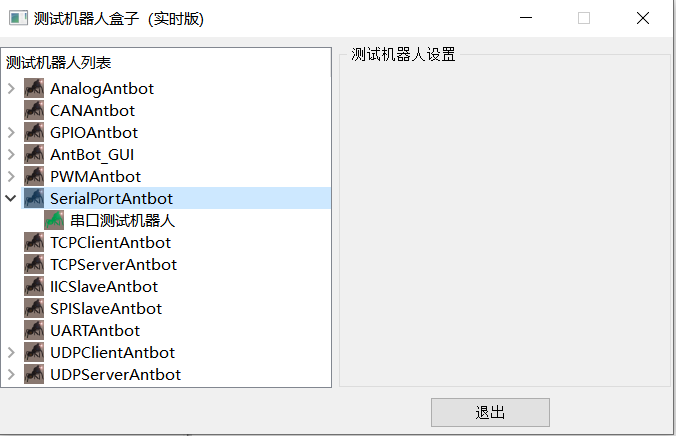
登录后,可以看到如下图的机器人盒子:
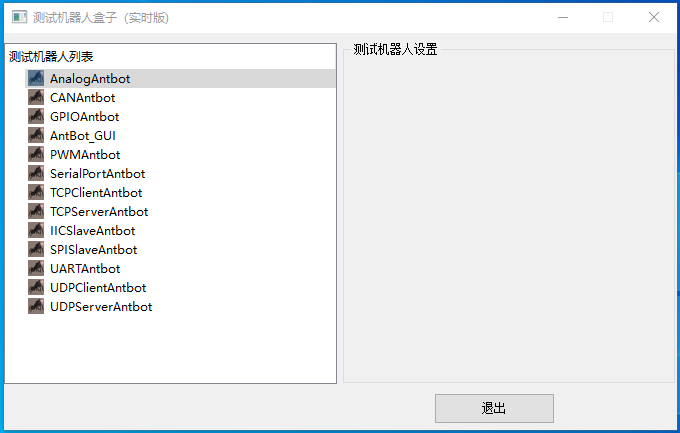
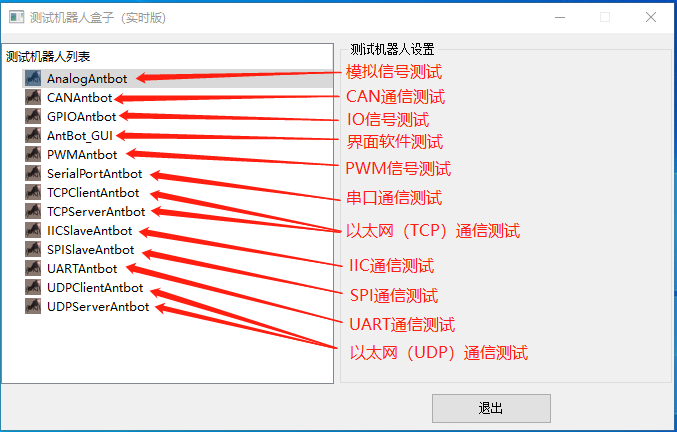
测试机器人盒子中包含了各类在嵌入式测试需要使用的测试机器人:
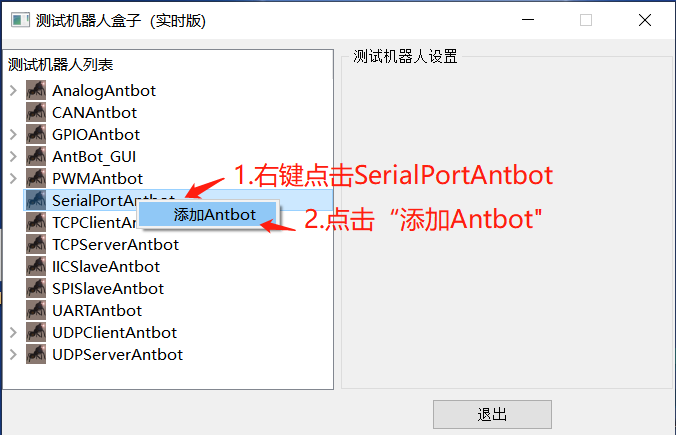
根据实际的测试需要在测试机器人盒子中配置相应类型的测试机器人,各种测试机器人配置的操作步骤非常相似,下面以串口测试机器人(SerialPortAntbot)为例进行配置。
(1)右击SerialPortAntbot,选择“添加Antbot”:
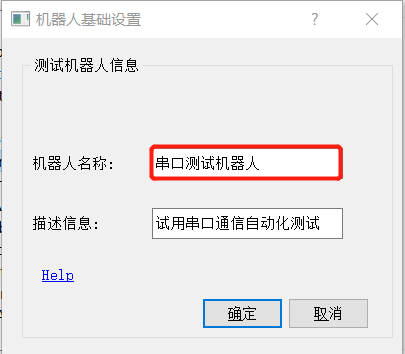
(2)弹出“机器人基础设置”界面,对测试机器人名称和描述信息进行设置,例如下图测试机器人名称为“串口测试机器人”:
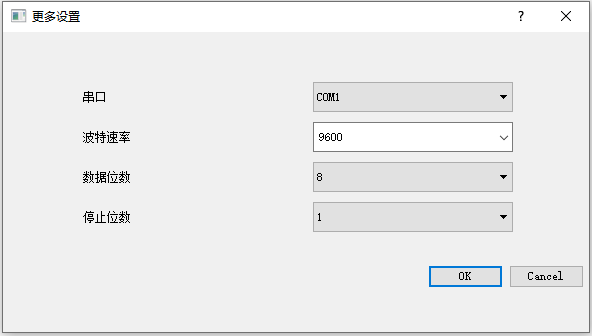
(3)点击“确定”按钮,进入“更多设置”界面,“更多设置”界面主要是用于配置硬件模块连接信息,不同类型的机器人的配置信息不同。对于串口通信测试,主要是端口号和波特率等信息,根据实际情况进行配置,如下图:
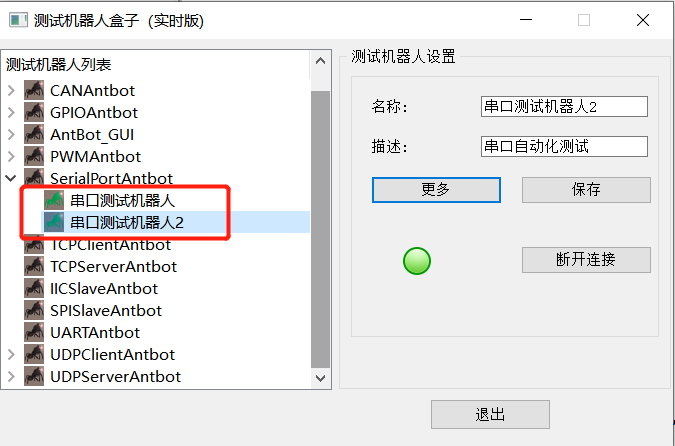
(4)点击“OK”按钮,测试机器人添加成功:
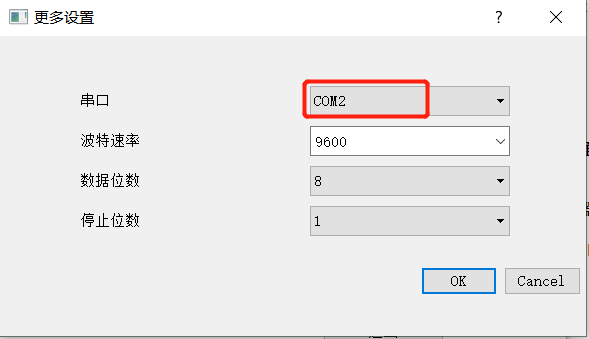
(5)同样的方法再配置一个串口测试机器人,根据实际情况选择另外一个端口,本示例中为COM2
以太网(UDP)测试机器人有两种,分别对应通信的客户端和服务端,其配置的操作同上面串口机器人类似。
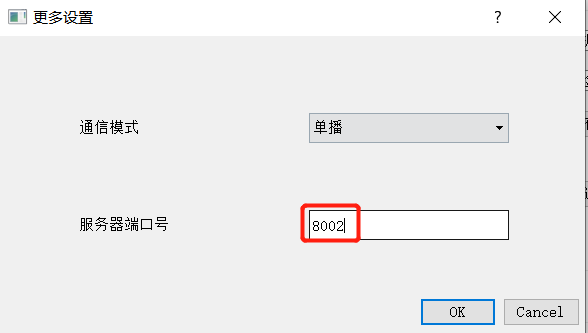
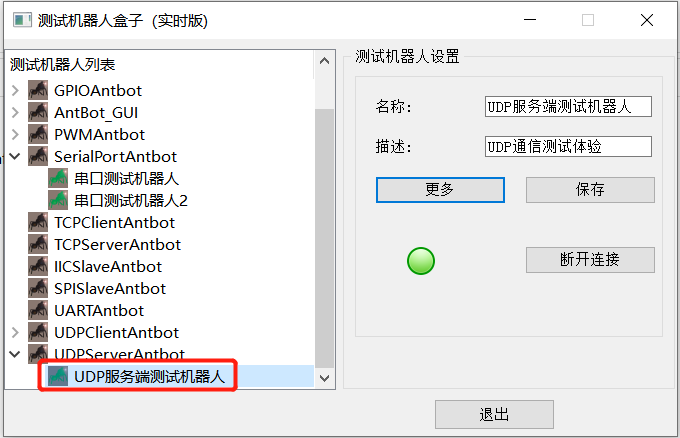
(1)配置UDP服务端测试机器人,输入服务端侦听的端口号,如下图
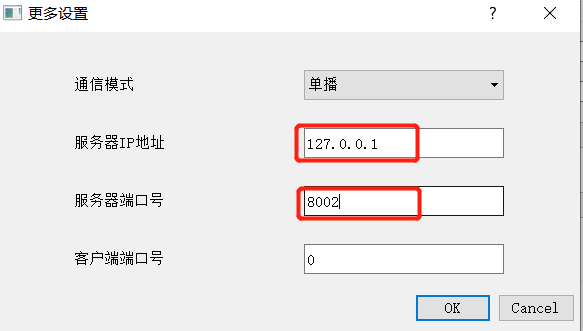
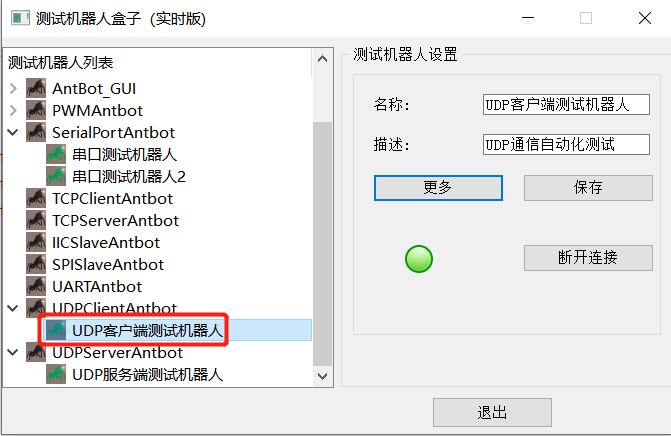
(2)配置UDP客户端测试机器人,输入服务端的IP地址和端口号,如下图
同样的方式配置需要使用的其他测试机器人
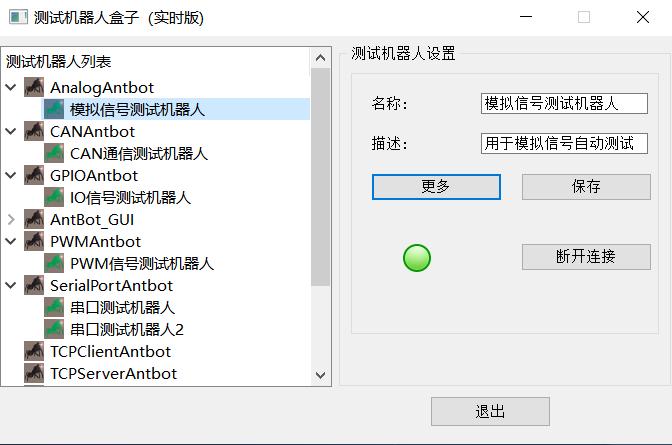
例如一个嵌入式测试中涉及模拟信号测试、IO信号测试、PWM信号测试、CAN通信测试,则在测试机器人盒子中配置相应类型的测试机器人,如下图:
配置完成后,就可以在宏控UTP测试平台上使用这些机器人的命令设计各种时序逻辑的测试用例,进行自动化测试执行。